Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Cancel
- Home
- :
- All Communities
- :
- Products
- :
- ArcGIS Reality
- :
- ArcGIS Drone2Map
- :
- ArcGIS Drone2Map Questions
- :
- Re: Values for Camera Optimization are high
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Values for Camera Optimization are high
Subscribe
16037
11
12-03-2018 11:40 AM
12-03-2018
11:40 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
I'm generating orthos with a Phantom 4 Pro, using a 80% forward and 80% side overlap for flights at 100 meters and am routinely getting high values for the relative difference between initial and optimized internal camera parameters. The orthos look good and are fine for projects that don't require survey grade accuracy, but for some projects I need these values to be better. Has anyone run into this problem and found a solution?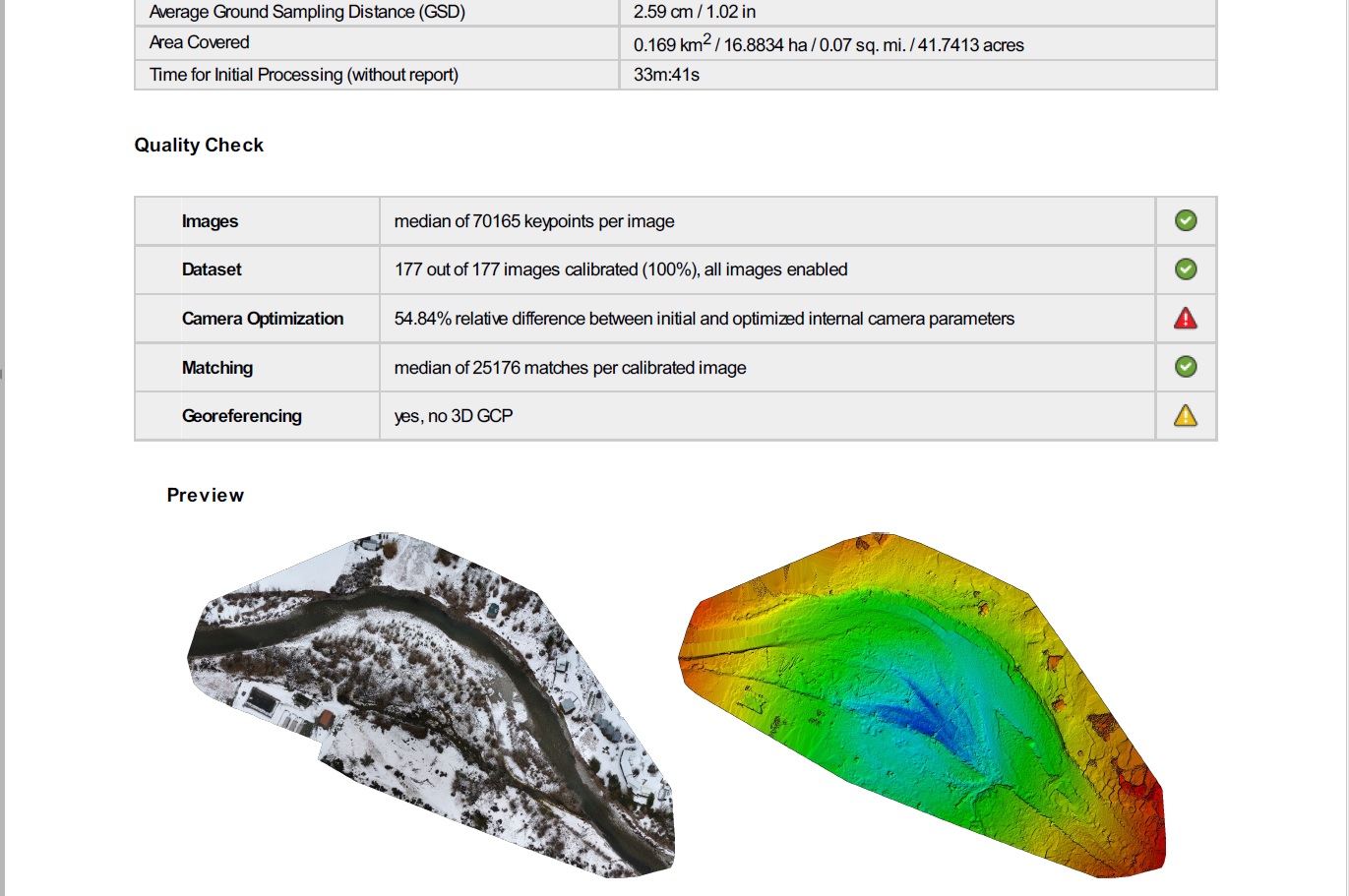
11 Replies
{kind=link}
{kind=link}
01-22-2019
05:16 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
Hi Cody,
In your previous comment, you mentioned this:
If you have ground control points, do you know how to withhold some from the processing and apply them as Check points to measure your output accuracy? If you need instructions on that, I can send information.
Can we withhold the check points directly in the Drone2Map software? If you don't mind, could you share the information please?
Thanks!
- « Previous
-
- 1
- 2
- Next »
- « Previous
-
- 1
- 2
- Next »