Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Cancel
- Home
- :
- All Communities
- :
- Developers
- :
- ArcGIS API for Python
- :
- ArcGIS API for Python Questions
- :
- arcgis.learn show_batch Index Error and lr_find as...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
arcgis.learn show_batch Index Error and lr_find assertion failed error
Subscribe
04-18-2020
12:51 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
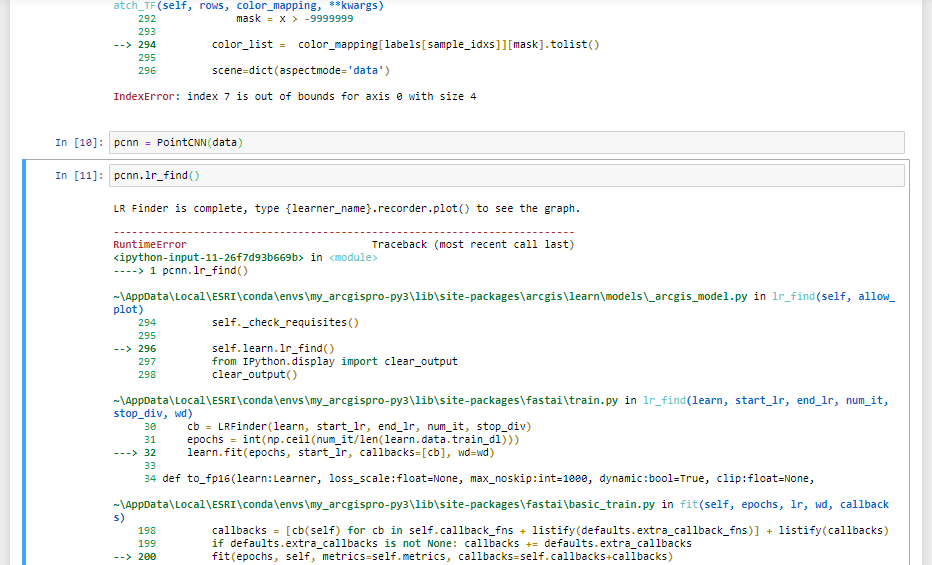
I am trying to segment lidar point cloud using PointCNN on jupyter notebook. But I am getting Index Error on running show_batch() and runtime error on running lr_find()
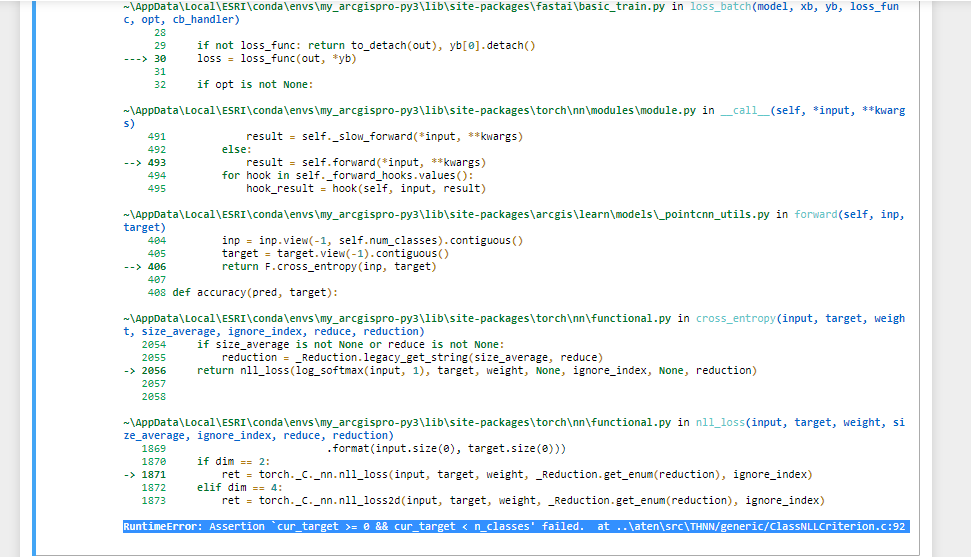
IndexError: index 7 is out of bounds for axis 0 with size 4RuntimeError: Assertion `cur_target >= 0 && cur_target < n_classes' failed. at ..\aten\src\THNN/generic/ClassNLLCriterion.c:92
Any pointers that can help me in solving/debugging these error?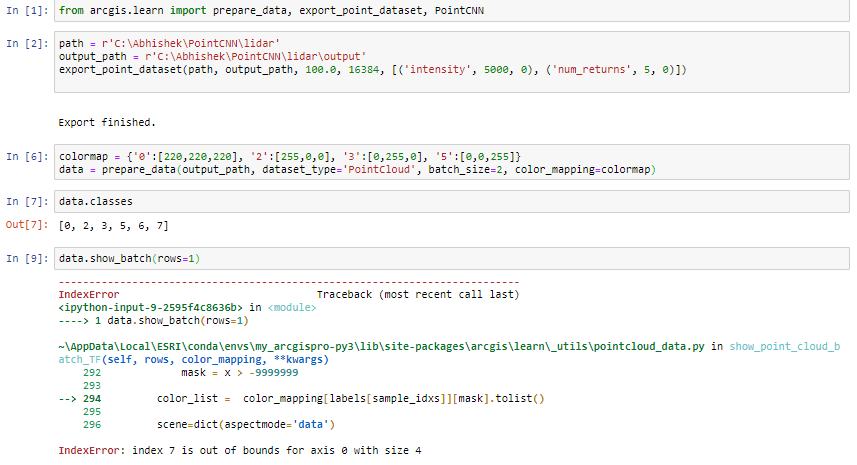
P.S. I am not a developer or coder so please excuse any silly mistake.
Solved! Go to Solution.
1 Solution
Accepted Solutions
04-20-2020
12:45 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
okay so the problem is with the LiDAR classification codes. Since they are not continuous as you can see in In[7] data.classes.
how to solve it? Its simple just reclassify codes to 0,1,2,3,4.....n
1 Reply
04-20-2020
12:45 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
okay so the problem is with the LiDAR classification codes. Since they are not continuous as you can see in In[7] data.classes.
how to solve it? Its simple just reclassify codes to 0,1,2,3,4.....n