- Home
- :
- All Communities
- :
- Global
- :
- Asia Pacific
- :
- ArcNesia
- :
- ArcNesia Blog
- :
- Drone2Map - 2D Mapping: Membuat Orthomosaic dari D...
Drone2Map - 2D Mapping: Membuat Orthomosaic dari Data Foto Drone/UAV
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
Drone2Map – 2D Mapping
Oleh: Andika Hadi Hutama
Drone2Map for ArcGIS merupakan salah satu premium apps yang memiliki kapabilitas untuk memproses data foto yang diambil oleh drone/UAV menjadi produk digital fotogrametri seperti orthophoto (2D) ataupun model 3D untuk keperluan visualisasi dan analisis. Pada tulisan kali ini, user akan berlatih membuat orthomosaic (2D) dengan studi kasus sederhana menggunakan data foto UAV yang sudah ter-geotag. Studi kasus kali ini akan memetakan kawasan Taman Tugu Tani, DKI Jakarta.
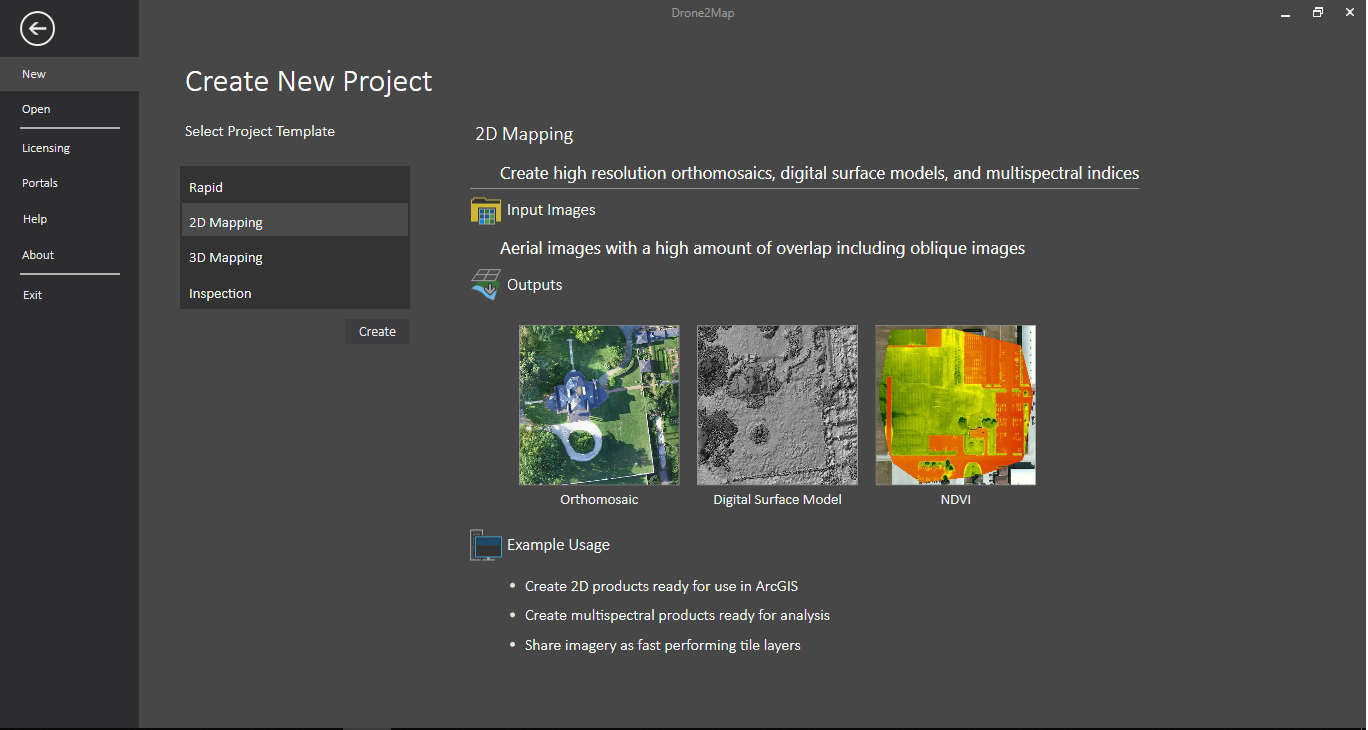
1. Create New Project > 2D Mapping > Create
Give Your Project A Name
Berikan nama untuk project terkait
Select Where To Store Your Project
Tentukan tempat penyimpanan project
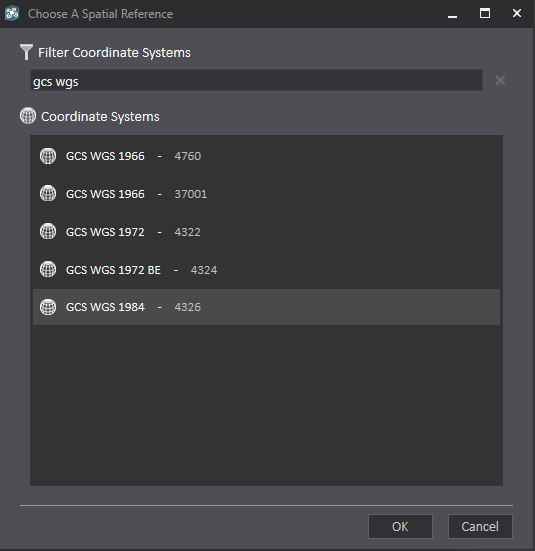
Coordinate System > Edit > Choose A Spatial Reference
Tentukan sistem koordinat yang digunakan pada daerah yang bersangkutan. Pada kasus ini, sistem koordinat yang digunakan merupakan GCS WGS 1984
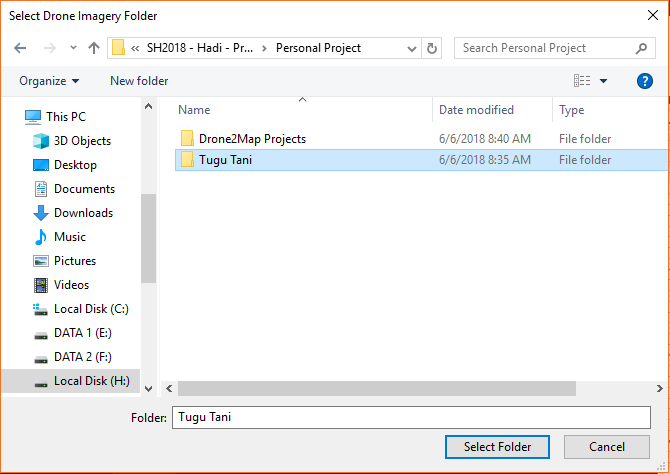
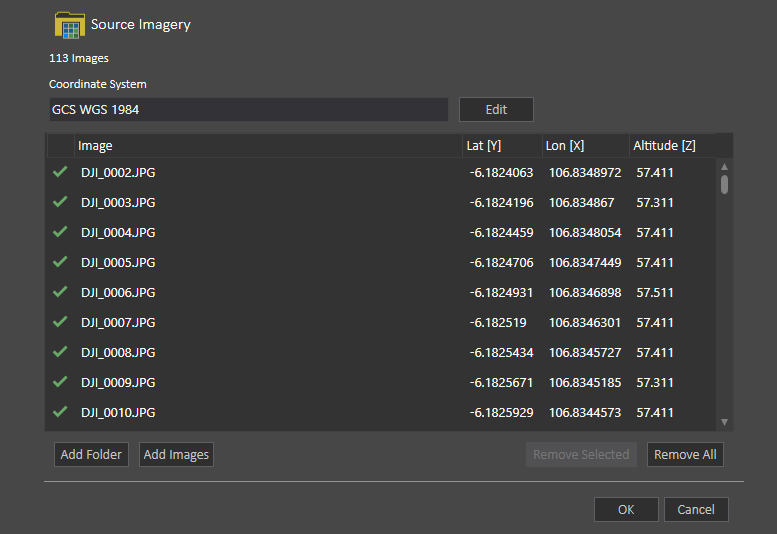
Add folder/images > Select Drone Imagery Folder
Input data set foto yang akan diproses. Sebaiknya data foto dikumpulkan dalam 1 folder, dengan penamaan file yang berurutan seperti yang dapat dilihat pada gambar. Pada studi kasus ini, data foto diperoleh menggunakan wahana DJI Mavic Pro, sehingga masing-masing data foto tersebut sudah memiliki informasi posisi berupa koordinat (lintang, bujur, ketinggian).
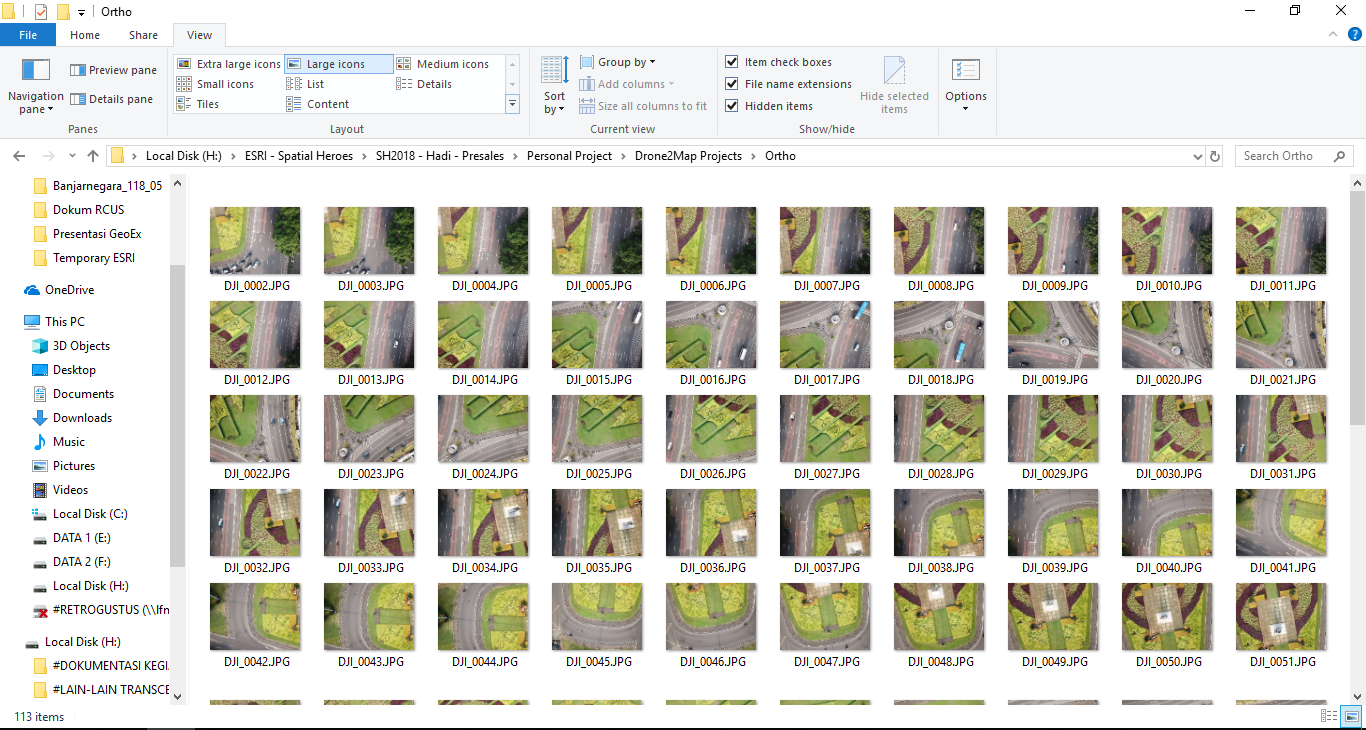
Apabila data foto sudah ditentukan, maka akan tampil seperti layar berikut:
2. Toolbars
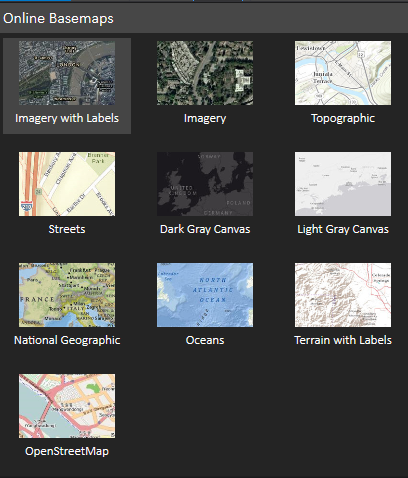
- Basemap -> merupakan fitur untuk memilih layer basemap. Pada kasus ini basemap yang dipilih merupakan Imagery
- Manage GCPs -> GCP atau Ground Control Point merupakan titik kontrol yang akan digunakan sebagai koreksi posisi pada hasil produk orthomosaic nantinya. Syaratnya, user harus mengetahui nilai koordinat dari titik-titik GCP tersebut. Namun, pada studi kasus ini, penentuan titik-titik GCP tidak perlu dilakukan. Pembuatan orthomosaic tetap dilakukan karena data foto yang akan diproses sudah memiliki nilai koordinat hasil pengukuran GPS dari wahananya.
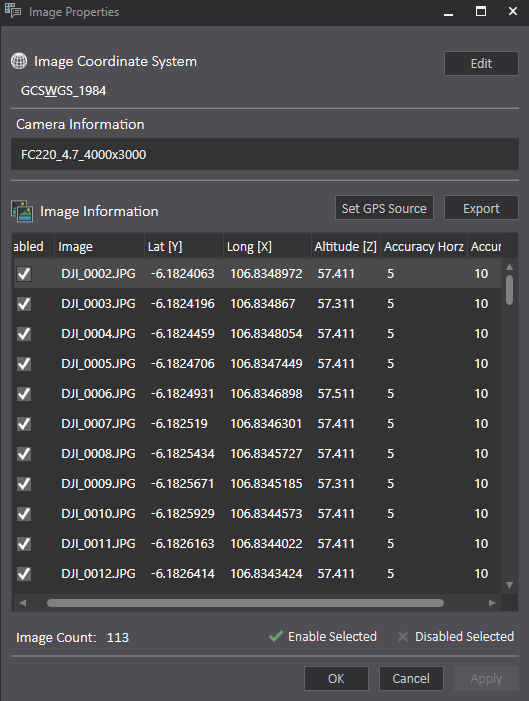
- Image Properties -> menyediakan informasi mengenai masing-masing data foto
3. Processing Options
Sebelum pemrosesan dimulai, konfigurasi harus terlebih dahulu dilakukan. Masing-masing produk akan menentukan pengaturan konfigurasi yang berbeda, maka dari itu, user diharapkan memahami produk apa yang ingin dibuat dan data apa yang sudah dimiliki.
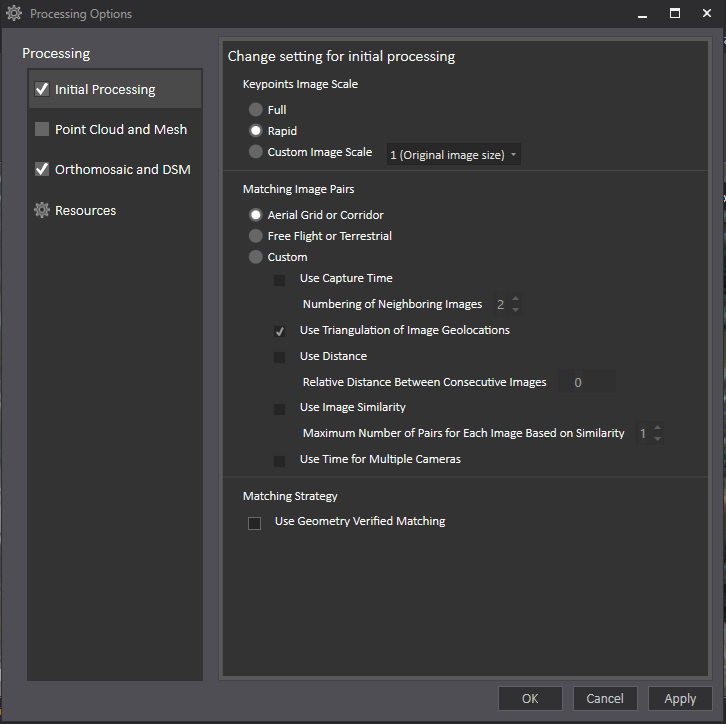
- Initial Processing
Keypoints Image Scale [Rapid]
Parameter ini bertujuan untuk menentukan banyaknya keypoints dalam 1 foto. Parameter Rapid dipilih bertujuan untuk mengurangi durasi pemrosesan data.
Matching Image Pairs [Use Triangulation of Image Geolocations]
Parameter [Aerial Grid or Corridor] dipilih berdasarkan metode akuisisi data foto. Berdasarkan studi kasus ini, sebelumnya telah dilakukan akuisisi data foto menggunakan DJI Mavic Pro dengan desain terbang grid atau corridor. Pada umumnya, beberapa wahana UAV komersil sudah memiliki sistem otomasi desain terbang seperti ini.
Parameter [Use Triangulation of Image Geolocations] dipilih sebagai metode untuk menentukan metode pemrosesan data set foto menjadi orthomosaic. Parameter ini dipilih karena seluruh dataset foto sudah memiliki informasi posisi (koordinat lintang, bujur, ketinggian)
- Point Cloud and Mesh
Karena tujuan dari pemrosesan data adalah untuk memproduksi produk orthomosaic (2D), apabila user dirasa tidak membutuhkan model 3D, maka proses pembuatan Point Cloud dan Mesh tidak perlu dilakukan. Matikan mode centang pada tab Processing
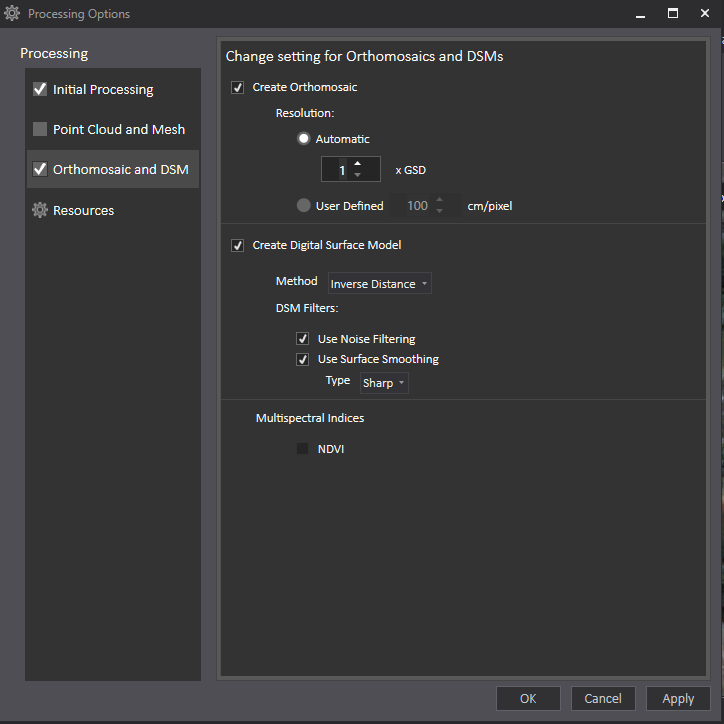
- Orthomosaic and DSM
Create Orthomosaic [Automatic]
GSD adalah Ground Sampling Distance. Nilai ini biasanya sudah diestimasi berdasarkan parameter-parameter lainnya seperti spesifikasi sensor pada kamera, tinggi terbang, dan lainnya.
4. Start
Klik start untuk memulai pembuatan orthomosaics. Durasi pemrosesan data akan bergantung kepada jumlah foto dan konfigurasi pada Processing Options yang sudah ditentukan. Ketika proses pemrosesan sudah dimulai, indikator proses dapat dilihat di bagian bawah interface Drone2Map, seperti berikut:

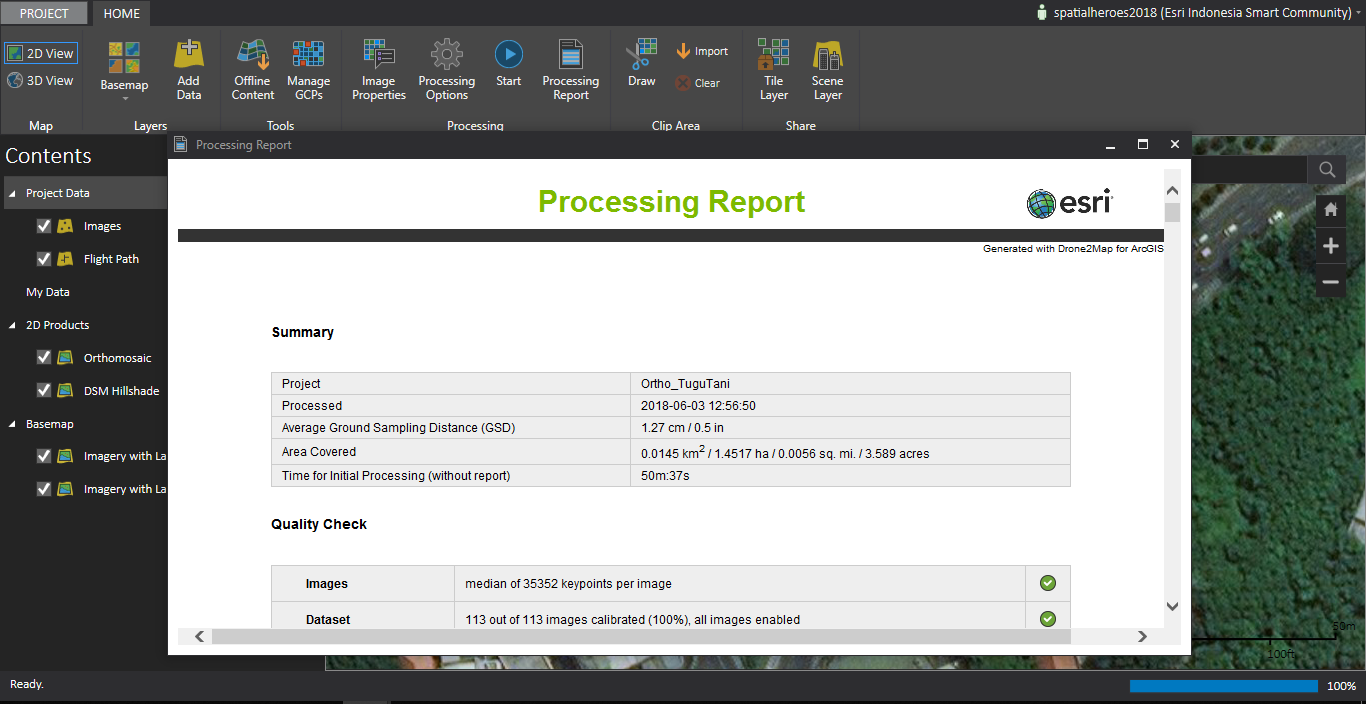
Berikut merupakan penampakan pada Drone2Map apabila pemrosesan data sudah selesai. Orthomosaic dapat langsung dilihat pada fitur mapviewer.
.PNG)
5. Processing Reports
Untuk membuat laporan mengenai project terkait -> Processing Report. Informasi spesifik mengenai project Drone2Map terkait, seperti luasan area, GSD, desain terbang, dan lainnya dapat dilihat pada Report tersebut.
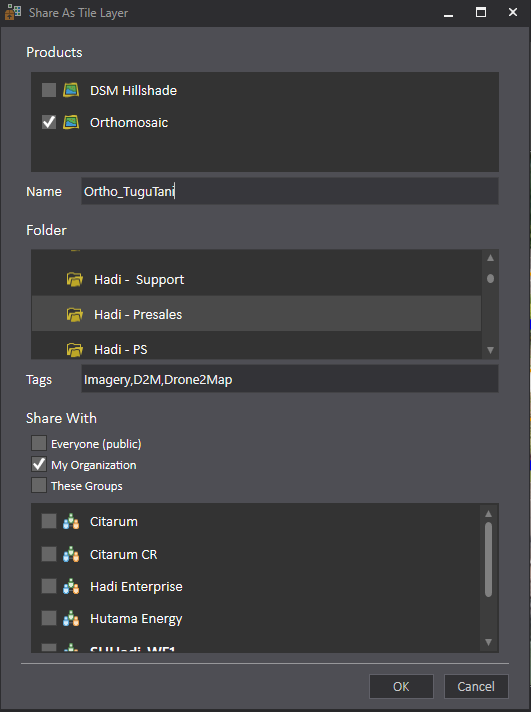
6. Share As -> Tile Layer
Setelah pemrosesan data selesai, produk orthomosaics dapat dibagikan menggunakan akun ArcGIS Online/Portal for ArcGIS.
Artikel ini dibuat oleh Andika Hadi Hutama dari ESRI Indonesia Spatial Heroes 3.0
You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.