- Home
- :
- All Communities
- :
- Developers
- :
- Python
- :
- Python Blog
- :
- Free advanced tools ... Convex Hulls...
Free advanced tools ... Convex Hulls...
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
Free basic functionality.
Another Free missive that uses numpy and arcpy to produce functionality that is normally restricted to the Standard or Advanced ArcGIS Pro license.
Previously
- Feature Extent to Poly Features
- Free Tools : Frequency and Statistics
Help topics
- -Convex hull in Minimum bounding geometry
Spatial containers
The extent poly* features done previously, is one of the standard containers. The convex hull is the most widely used and the easiest to implement, not because of the simplicity but because of the availability of standard algorithms. Many packages use modules from the ... qhull … package.
Normally containers only make sense if you are using projected coordinates or can perform geodesic densification.
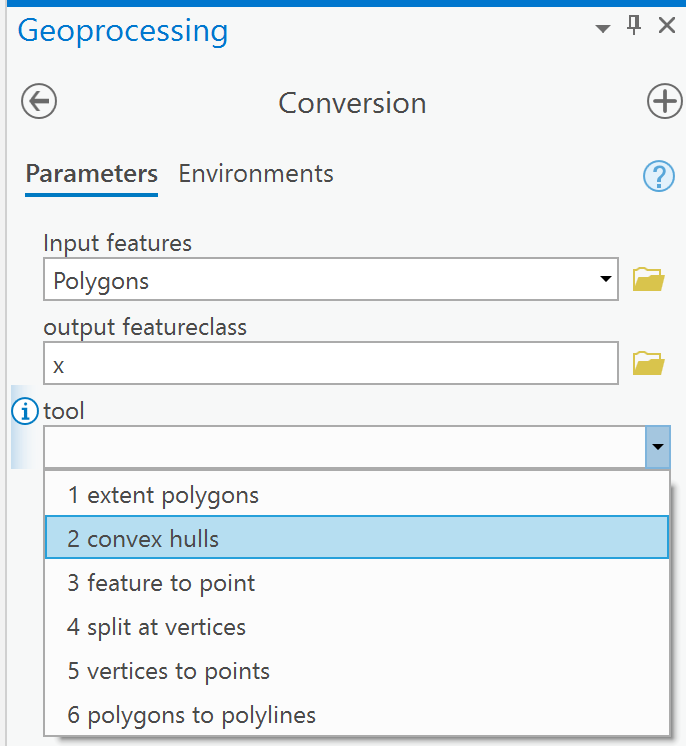
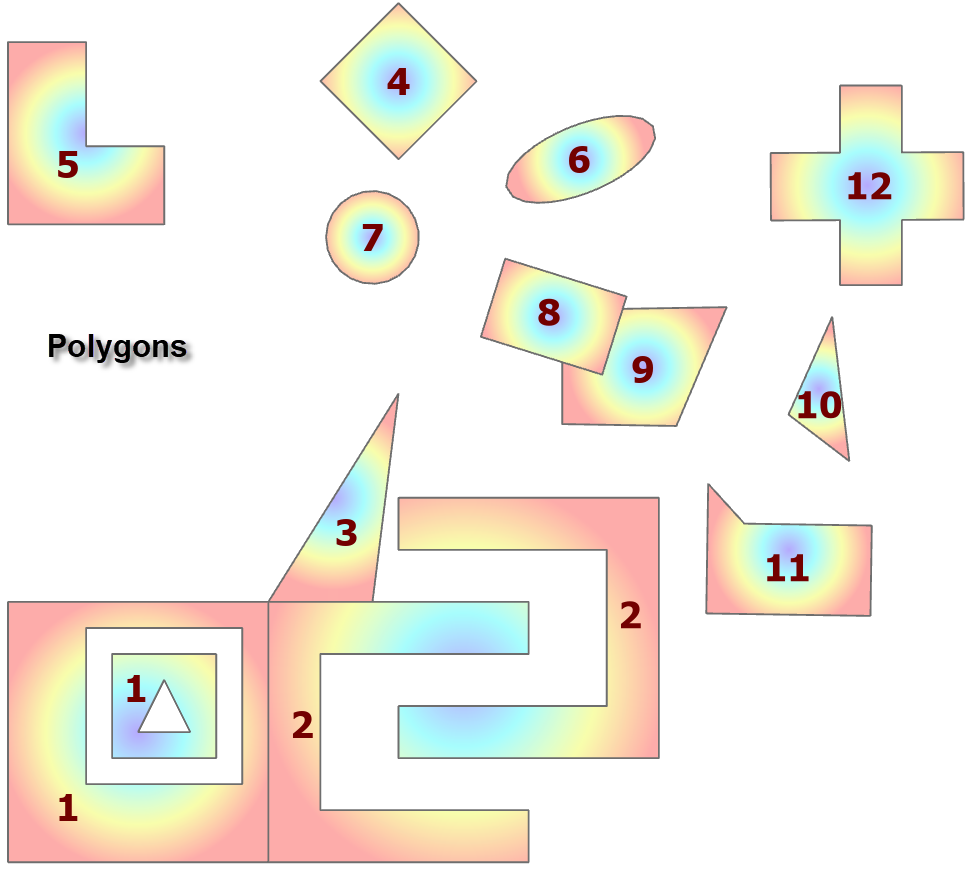
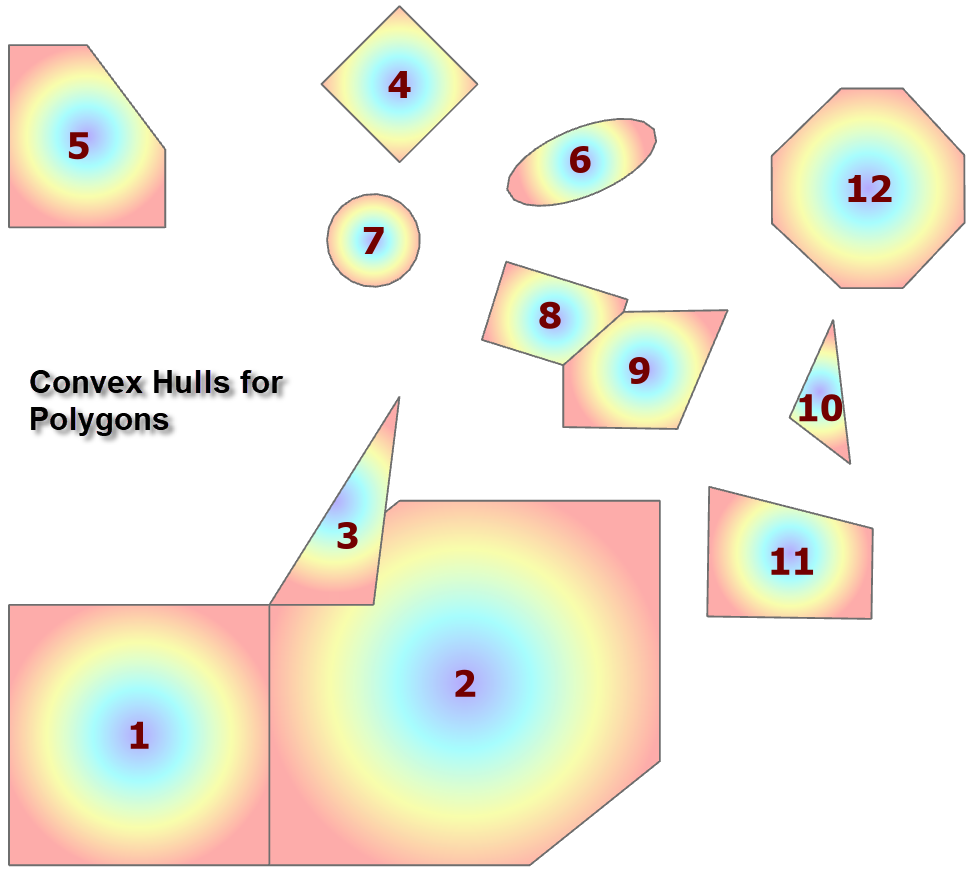
Output example
Pretty well sums it up.
- Specify the input featureclass (polygon, polyline or multipoint),
- the output featureclass,
- select convex hulls from the tool selection
--------------------------------------------------------------------------------------------------------------------------------------------------------
The conversion uses the numpy based Geo class that I describe in the 8 part series on geometry.
I could add the original attributes to the result (either within the toolset or after) or I could also
The full call to the tool, or the equivalent bits that I need.
A spatial or attribute join would be another alternative if you need attributes as well.
If you have a preference let me know.
The results are derived quickly and there is an optimization if the number of points making up the shape exceed about 50. This was a qualitative estimate of the cross-over point between implementing a python solution versus a C compiled solution from qhull.
WARNING
I have code that checks the validity of the file paths. If you input or output paths contain spaces or other flotsam, then the tool will not produce any results. Why? Too many questions where file paths are the problem. I won't 'enable' the current practice 
Download
You can copy the contents of the folder on my GitHub pages. No fancy install, just create a folder, through the stuff in, load the toolbox and give it a try.
You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.