- Home
- :
- All Communities
- :
- Products
- :
- ArcGIS Drone2Map
- :
- ArcGIS Drone2Map Questions
- :
- Values for Camera Optimization are high
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Values for Camera Optimization are high
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I'm generating orthos with a Phantom 4 Pro, using a 80% forward and 80% side overlap for flights at 100 meters and am routinely getting high values for the relative difference between initial and optimized internal camera parameters. The orthos look good and are fine for projects that don't require survey grade accuracy, but for some projects I need these values to be better. Has anyone run into this problem and found a solution?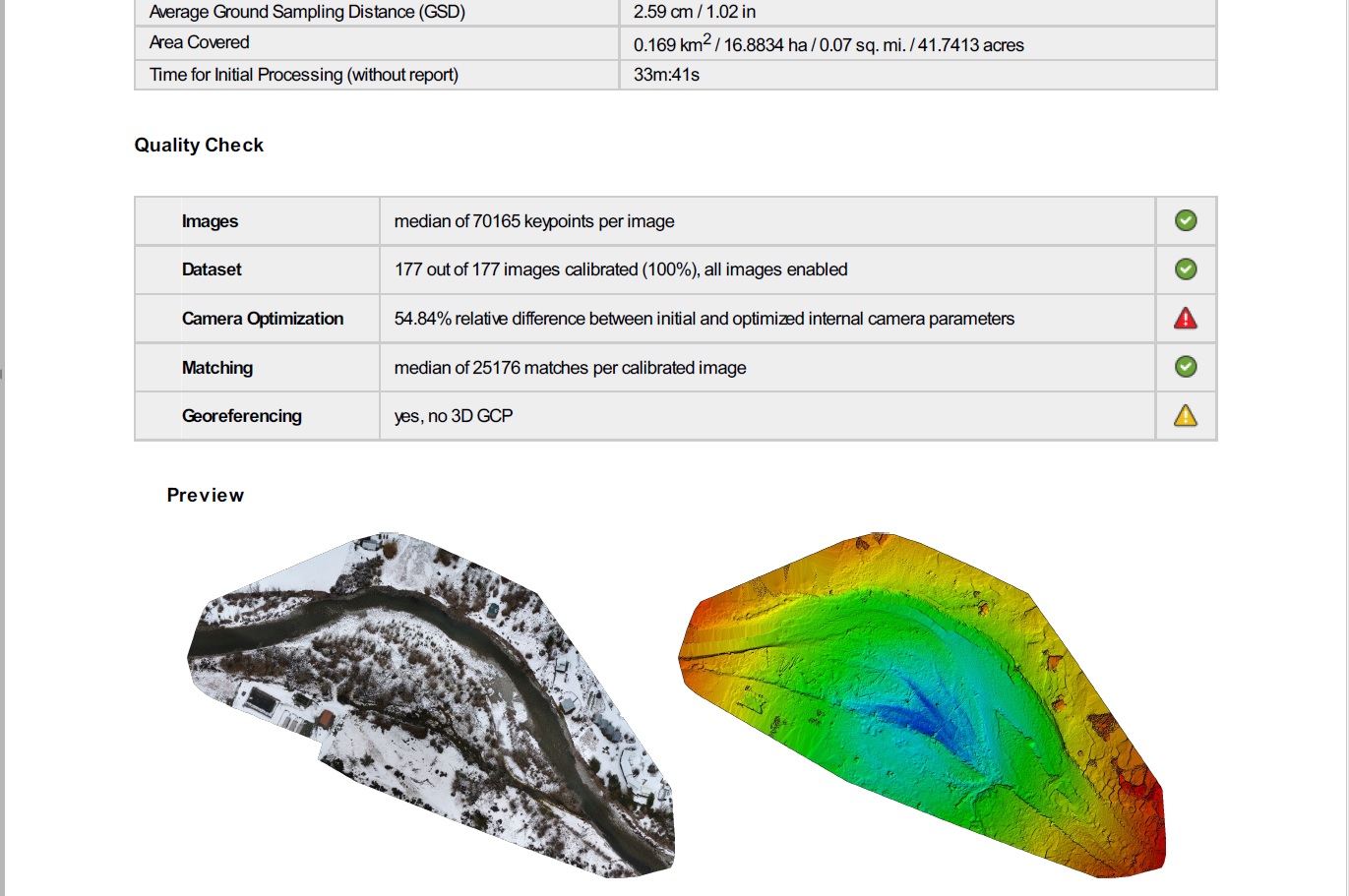
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Jason
I would agree that a 54% difference from initial estimates to optimized values is significant, but don't take this value as an indication of poor accuracy in the resulting ortho. This sounds like your camera may have a bit of a problem, and it will be important to keep an eye on this to determine if your camera is stable (e.g. lens & sensor should be relatively rigid, but if they're physically moving around, the camera parameters can change dramatically). If it's not stable, you will likely have increasing problems.
I'd like to see more information on the camera parameters - could you send the full processing report? Ideally send more than one report - perhaps your most recent and your oldest, so we can see if the values are changing significantly. It's also possible your camera is just fine, but its parameters are simply different from the nominal values expected for a P4 Pro.
(you can send me a direct message if you don't want to post your reports publicly)
As long as the camera was stable for the duration of the flight, the calibration should be good for all images, and your results should be fine. If you have ground control points, do you know how to withhold some from the processing and apply them as Check points to measure your output accuracy? If you need instructions on that, I can send information.
Cody B.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Cody,
Thanks for the response. I tried to pm you, but apparently I can't unless you're following me? I've attached one of my first flights along with the latest one. It seems like camera optimization values were high from the beginning, but the orthos looked good. I am not using ground control points for most of my fights for two reasons. 1) I don't have a cost-effective way to measure them and 2) Most of the work that I do doesn't need to be that precise. What is the best way to measure GCPs without using a surveyor? Would it be using an RTK receiver such as the arrow 200? I will check on the stability of the P4P gimbal and sensor.
Jason
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Jason
Just to add that for my needs I have had good results using Collector with GPS averaging set to 30 seconds for each point captured. In ArcGIS Online there is a easy way to create a new feature class with the right attributes names using their Ground Control feature template.

The vertical resolution can still be off so I do update the altitude values by running the Extract Values to Points GP tool using the Terrain image service from the Living Atlas. This at least puts my 3D mesh nicely on the ground.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Thanks for the collector recommendation Mervyn. So you're using collector on a phone or tablet/ipad? If so, are you connecting them to any kind of GPS receiver to improve the location data?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I am using Collector with my Samsung Galaxy S8 phone, with no external
receivers. That's why I need use the averaging function to try and improve
the accuracy. The error is probably between 1 and 6 meters based and a few
comparisons with basemap imagery.
I also carry with me a set of A4 white boards (each with a large black
cross) that I place across my study area and use to record my ground
control points.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Mervyn. I've started doing test flights using targets and the method you described with collector on my Samsung S9. You mentioned that in Collector, you've set averaging to 30 seconds for each point captured. It seems in the settings that my only option for GPS averaging is in the number of locations, and not the number of seconds. I set it to 30 locations. Is that what you meant? Also, what did you set the 'streaming interval' and 'location accuracy' fields to?
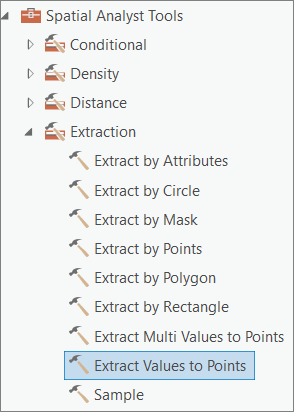
One more thing. You mentioned using the Extract Values to Points GP tool using the Terrain image service from the Living Atlas. I've found the terrain image service in living atlas but can't seem to find the "extract values to points GP" tool there. Can you point me towards it?
Thanks
Jason
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Jason
You are correct, I meant that it records an average for 30 locations instead of seconds.
I do not recall what I set the streaming interval to (probably the default value) or the location accuracy to (I suspect I had set this to 4-5 meters) as I am now testing the new Aurora Collector app but which has not yet implemented the GPS averaging functionality in the current beta version. I noticed it is implemented for the iOS platform.
The Extract Values to Points requires the Spatial Analyst extension. Under the Extraction toolset.
Good luck
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Jason
Several issues... First, sorry you couldn't message me - I thought my settings should allow it, but will hope to fix that.
Second, re: control points, there are a range of options depending on your requirements - but if high accuracy not required, then you wouldn't need an RTK GPS unit. Simplest/cheapest is to simply use the ArcGIS Online imagery basemap to find features, realizing that a) the accuracy is limited (and actually not stated) but I'd expect you should be within ~1-2 meters in most parts of the USA, and b) for some project areas you'll have trouble finding good photo identifiable points. Note be sure your GCPs are on the ground; I've seen people use the tops of buildings and wonder why their Z values are 5 to 10 meters too low... (mesh can disappear into the ground)
If you need to lay out markers and survey them before imaging, Mervyn's post shows a black/white linoleum tile you could use (although I recommend Black and GRAY, since the white will "bloom" and grow in size in your images), then you'd need a GPS receiver, and your accuracy would depend on the GPS accuracy.
Third, most important issue = the discrepancies in camera models... [full disclosure, I've edited this post to modify previous text]
The processing in Drone2Map will self-calibrate the camera model based on your flight altitude (which should be expressed as orthometric height e.g. above sea level, not height above ground or launch point). We have found that some drones report very poor Z values, so if you are seeking a high accuracy camera model, you will need to adjust your flight altitudes within Drone2Map. You can do this after loading images by going to the Image Properties menu, selecting images, and then run Image Options/"Adjust image altitudes".
As noted in a post further up, this is NOT required to achieve good XY accuracy in the orthomosaic, but only required if you need a good camera model from the self calibration. We're working to make this more seamless and robust in Drone2Map 2.0
Cody
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Thanks for trying to solve this problem Cody. I have not done anything to change the lens on this camera. It may be of interest that it's a refurbished P4P that I bought in July. I've attached a small batch of images from my last flight.
Jason
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}