Noise Removal and Manual Classification in LAS Cloud
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
LAS Point Clouds data can be accurate and reliable, ONLY when following rigorous quality control standards during acquisition and processing in operation.
LiDAR acquisition systems capable of recording lidar data with sufficient accuracy over a range of altitudes should be required. With good acquisition plan, highly qualified field personnel consisting of professional licensed land surveyors, licensed pilots and LiDAR technicians operate the system to ensure quality results from each flight to meet project requirements.
Generally, laser data processing means numerous 'rigorous' working steps.
Typical steps in their different working order are as follows:
•Working with trajectories;
•Dividing data into smaller geographical regions (blocks);
•Classifying points by echo;
•Deducing line numbers to points;
•Classifying ground points separately after each flightline;
•Measuring match of overlapping strips;
•Solving heading, roll and pitch for whole data set;
•Verify corrections visually;
•Cutting overlapping point strips;
•Classifying ground points back to default;
•Starting final classification to ground, vegetation, building etc. classes.
In practice, the data should be divided into smaller blocks of around 5- 10 million points, due to the limits of current operating systems and computing.
Never delete points, add points, or change the elevation of points in LAS data, when working in the LAS format. Specialists only attribute each point with various flags that reflect attributes or characteristics of that point. Usually, returns are flagged several ways: by return number, by layer, or by type classes.
Return number is simply first, second, third, fourth, etc., depending on the number of returns recorded by the particular sensor (attachment - Major LiDAR Sensors). Layer relates to return number, but takes one step toward elevation classification. In the LAS format, class types can be classified properly, even user-defined (attachment – LAS 1.4). If the end-result of the project is to produce a bare earth terrain model, the following categories are recommended:
- Bare Ground (Terrain);
- Features above ground (including buildings, tree crowns, cars, poles, bridges…);
- Water; and
- Noise
Noise Removal
The very first step in post-processing is to identify and eliminate noise points, which are extremely high or low points outside the range of realistic elevations for the project area. Anomalously high points can be caused by atmospheric aerosols, birds, or low-flying aircraft; low points might be caused by laser multipath. While noise points would probably be removed later by automated filtering, it is usually advantageous to remove them even earlier in the processing workflow. Many software packages use the absolute minimum and maximum elevations in a dataset as the basis for assigning a scale for color-by-elevation symbology.
Noise points will cause the elevation range in areas of real interest to be compressed within the color scale. In addition to a simple band filter with high and low limits to classify these points as noise, which is Class 7 - Low Point (noise) in the LAS format, remote sensing specialists should use advanced algorithms to minimize noise, including manual editing.
Once labeled, noise points can then be ignored by software for display purposes and in analytical computations, including feature extraction.
Manual Classification
As well known, automated filtering, appropriately applied, can effectively classify about 90 % of the ground points in a LiDAR point cloud. The remaining around 10% of the points must be visually inspected and classified manually, which involves human interaction with the data, familiarity with subject landscape, and knowledge of fundamental mapping principles, conventions, "best practice" and high-resolution optical imagery (airphotos, GeoEye, QuickBird, Pleiades) with advanced Lidar package like TerraScan, ENVI LiDAR, Leica CloudPro (Leica XPro, Leica Cyclone), or ERDAS LPS (point cloud).
In those LAS point cloud processing packages, manual editing and classification techniques are introduced to help improve data accuracy and reliability, in particular, when LAS data are not classified on latest LAS standard. This type of technique called 'Classify on Point Cloud' has been developed and is applied in the context of accepted mapping conventions and practices.
For example, the Point Cloud Classify lets us classify point clouds based on parameters that define objects (man-made structures) and vegetation, including DTM, City Model (buildings), and Canopy model (lower vegetation, medium vegetation, higher vegetation). Pls refer to the paper called 'CLASSIFICATION OF LIDAR POINT CLOUD AND GENERATION OF DTM FROM LIDAR HEIGHT AND INTENSITY DATA IN FORESTED AREA'.
The parameters for vegetation include a height and greenness criteria. The greenness criterion is applicable only to Point Clouds that have RGB information (below).
RGB-encoded Points Imagery, after high-quality-controlled Acquisition and Processing
(Accurate and Reliable LAS Points, ready for Geospatial and G&G applications)
If the final result of manual editing and classification is a detailed bare-earth terrain model (DTM), that means that those data have been quality controlled for completeness and lack of artifacts.
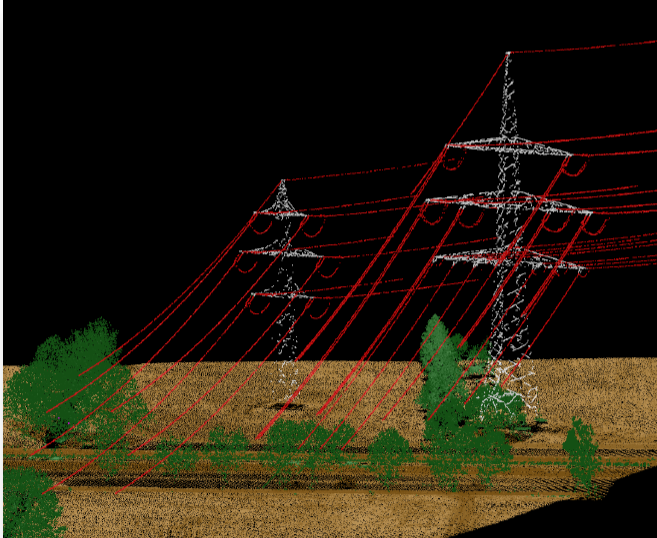
If the final products include 3D feature clouds, advanced photorealistic rendering and 3D modeling techniques should be applied to those 3D point clouds to create realistic representations and 3D analysis.
For city modeling, 3D features (buildings, tree crowns, powerlines, tanks, cars, poles, bridges) can be classified and modeled.
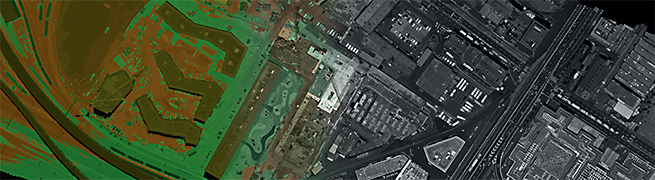
Finally, LiDAR intensity data also can be used to extract features, similar to raster imagery (see the slides by Bill)...
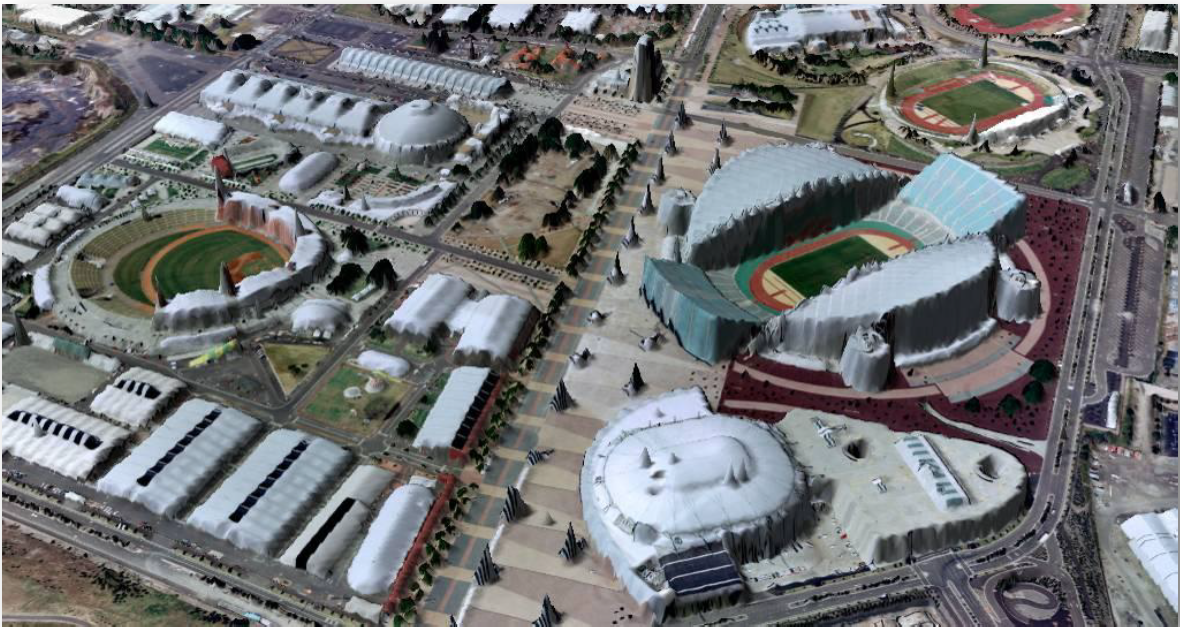
Photorealistic Rendering from Point Clouds for Visualization and 3D Modeling
++++++++++++
The LAS file format is a binary file format that maintains information specific to the LiDAR nature of the data while not being overly complex (http://www.asprs.org/Committee-General/LASer-LAS-File-Format-Exchange-Activities.html .
Keep in mind that LAS clouds can be also generated from stereo-pair optical imagery, in addition to LiDAR.
You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.