Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Cancel
- Home
- :
- All Communities
- :
- Products
- :
- ArcGIS CityEngine
- :
- ArcGIS CityEngine Questions
- :
- Re: report("xrot", convert(x, pivot, world, orient...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
report("xrot", convert(x, pivot, world, orient, 0,0,0)) problem
Subscribe
1041
6
03-20-2013 02:24 PM
03-20-2013
02:24 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hey I need a hand here,
I have only been concerned about orientations around the y-axis for most situations till now.
However now I am working with assets I have placed along roads.
The roads are conformed to a heightmap.
The result in our engine are orientations that are incorrect.
Is there a way to get quaternions back for orientation?
Or
Could you tell me the handedness of the rotations being applied so i know if to correct orientation.
The Euler Angle System being used.
many thanks
I have only been concerned about orientations around the y-axis for most situations till now.
However now I am working with assets I have placed along roads.
The roads are conformed to a heightmap.
The result in our engine are orientations that are incorrect.
Is there a way to get quaternions back for orientation?
Or
Could you tell me the handedness of the rotations being applied so i know if to correct orientation.
The Euler Angle System being used.
many thanks
6 Replies
03-21-2013
03:45 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hey Robert.
Which version of CE are you using ?
I know there was a bug in the convert() function in the 2011 version, which was resolved for the 2012 version.
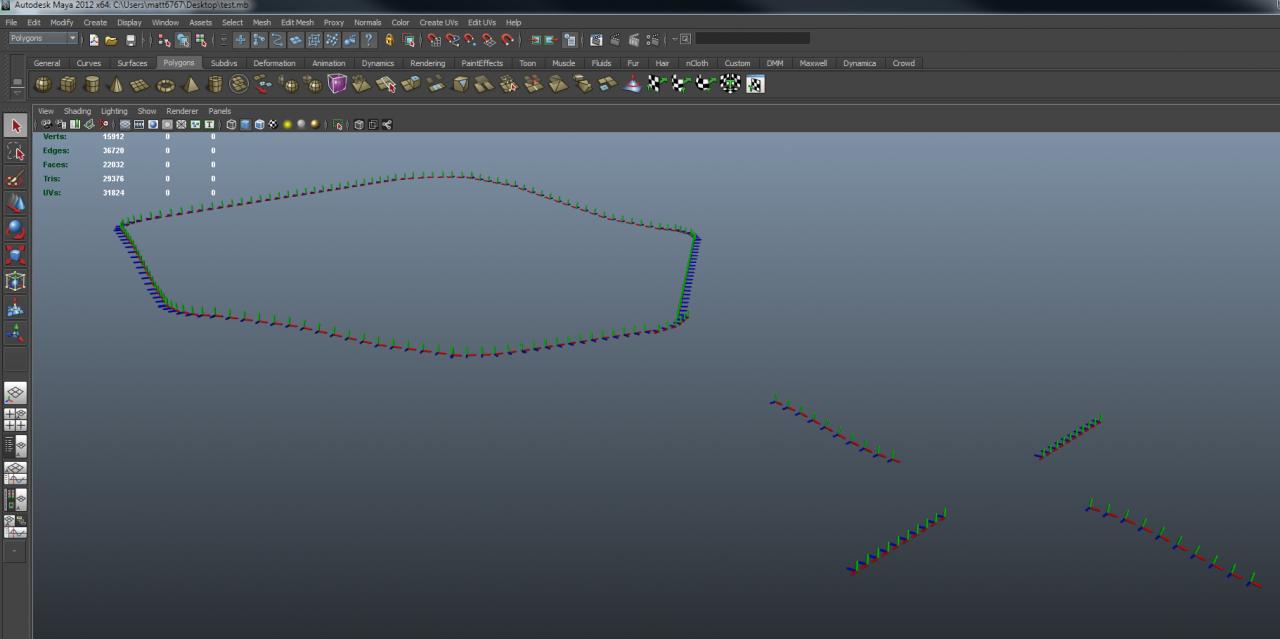
I have tested exactly this workflow in December and it worked perfectly. See attached image and other stuff.
[ATTACH=CONFIG]22825[/ATTACH]
Let me know this first, then we can dig deeper.
Matt
Which version of CE are you using ?
I know there was a bug in the convert() function in the 2011 version, which was resolved for the 2012 version.
I have tested exactly this workflow in December and it worked perfectly. See attached image and other stuff.
[ATTACH=CONFIG]22825[/ATTACH]
Let me know this first, then we can dig deeper.
Matt
{kind=link}
03-21-2013
08:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Esri CityEngine 2011.2 build 120125 (release, win32-64bit)?
03-25-2013
01:29 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi !
Then it's most probable that this is the bug which got resolved for 2012.
Can you download the 2012 Trial version and test it ?
http://www.esri.com/apps/Products/CityEngine2/index.cfm
Let me know if this is an option...
Matt
Then it's most probable that this is the bug which got resolved for 2012.
Can you download the 2012 Trial version and test it ?
http://www.esri.com/apps/Products/CityEngine2/index.cfm
Let me know if this is an option...
Matt
03-25-2013
08:25 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Can you Detail the bug here so we know the exact issue?
I believe I am see two different handed returns from the the convert function when pulling back coordinates from roads when compared to other shape geometry, would this be accurate?
I believe I am see two different handed returns from the the convert function when pulling back coordinates from roads when compared to other shape geometry, would this be accurate?
03-26-2013
03:13 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Robert,
CGA uses a right-handed coordinate system, and rotations are performed in a right-handed manner.
maybe this helps:
How to calculate a 3x3 rotation matrix R from CGA euler angles
alpha, beta, gamma = angles in radians
R = Rx(alpha) * Ry(beta) * Rz(gamma)
// sine, cosine
sa = sin(alpha);
ca = cos(alpha);
sb = sin(beta);
cb = cos(beta);
sg = sin(gamma);
cg = cos(gamma);
R[0][0] = cb*cg;
R[0][1] = sa*sb*cg - ca*sg;
R[0][2] = sa*sg + ca*sb*cg;
R[1][0] = cb*sg;
R[1][1] = ca*cg + sa*sb*sg;
R[1][2] = ca*sb*sg - sa*cg;
R[2][0] = -sb;
R[2][1] = sa*cb;
R[2][2] = ca*cb;
greetings
Decrement
CGA uses a right-handed coordinate system, and rotations are performed in a right-handed manner.
maybe this helps:
How to calculate a 3x3 rotation matrix R from CGA euler angles
alpha, beta, gamma = angles in radians
R = Rx(alpha) * Ry(beta) * Rz(gamma)
// sine, cosine
sa = sin(alpha);
ca = cos(alpha);
sb = sin(beta);
cb = cos(beta);
sg = sin(gamma);
cg = cos(gamma);
R[0][0] = cb*cg;
R[0][1] = sa*sb*cg - ca*sg;
R[0][2] = sa*sg + ca*sb*cg;
R[1][0] = cb*sg;
R[1][1] = ca*cg + sa*sb*sg;
R[1][2] = ca*sb*sg - sa*cg;
R[2][0] = -sb;
R[2][1] = sa*cb;
R[2][2] = ca*cb;
greetings
Decrement
03-26-2013
04:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Robert,
I just found that I the above statement about the bug having been fixed for 2012 was wrong. It's been fixed actually for 2011 already. Time friggin flies! (btw. it also seems to have nothing to do with your specific issue.)
ps.
Check the CGA change log at the very bottom of the CGA reference (there's a link)
I just found that I the above statement about the bug having been fixed for 2012 was wrong. It's been fixed actually for 2011 already. Time friggin flies! (btw. it also seems to have nothing to do with your specific issue.)
ps.
Check the CGA change log at the very bottom of the CGA reference (there's a link)